

NTT240

Regolare non è mai stato così facile. |
|
|
Caliper è lo strumento software progettato per rendere facile la calibrazione del vostro servodrive e motore tramite sistemi operativi Microsoft Windows. Un'interfaccia grafica estremamente intuitiva che velocizza e rende ancor più semplice l'accesso all'intera serie di funzioni disponibili su tutti i servoazionamenti di HDT tramite una veloce porta USB 2.0. Niente di più semplice. |
|
Modalità operative e funzioni tecnologiche. |
|
| Caliper permette di attivare e parametrizzare le modalità operative e le funzioni tecnologiche integrate nei drive HDT quali le modalità "Velocità", "Coppia", "Velocità e limite di Coppia" e gli applicativi "Multi-posizionatore", "Asse Elettrico", "Camma Elettronica" e "Controllo di pressione". Per ogni modalità selezionata, le I/O si configurano automaticamente di default ma possono essere reimpostate a piacimento da facili ed intuitivi menù, tanto quanto si possono impostare i valori dei punti che formano la camma elettronica, o i rapporti di riduzione tra master e slave nell'asse elettrico o le quote da raggiungere nell'applicativo multiposizionatore e ancora molte altre funzioni tutte da scoprire. Scopri di più..
|
|
Applicativo multiposizionatore. |
|
|
Il servodrive NTT integra un modo operativo tipo "multiposizionatore" con 4 modalità selezionabili. L'applicativo posizionatore vi permette di generare un profilo di velocità per riprodurre una traiettoria di moto con accelerazione e jerk controllati e posizionamenti precisi. Il calcolo del profilo viene eseguito in tempo reale consentendo anche la modifca del target di posizione al volo con tempistiche inferiori a 1 millisecondo lasciandovi gestire in modo veloce diversi profili di moto. Il posizionatore prevede una funzionalità denominata "arresto su tacca" che consente di eseguire un arresto di posizione controllato nel momento in cui viene rilevato, da un ingresso digitale del drive, il segnale di un sensore durante l'esecuzione della traiettoria. |
|
Posizionatore a quota singola. |
|
|
Questa modalità è attivabile sia con ingressi digitali/analogici che con tutti i bus di campo. Il drive così configurato permette di generare un profilo di traiettoria solo per una quota definita come posizione di target, con velocità, accelerazione, decelerazione e jerk. Le posizioni possono essere di tipo assoluto o relativo. Utilizzando i bus di campo tutti i parametri sono esclusivamente impostabili al volo da telegramma, solo il Modbus RTU consente di lavorare con la massima flessibilità utilizzando sia comandi modbus che comandi da ingressi digitali/analogici. Nel caso non si disponga di bus di campo, posizione e velocità possono essere impostati in modo analogico tramite il rispettivo ingresso mentre gli altri parametri tramite il software Caliper. |
|
Posizionatore con quota da tabella. |
|
|
Questa modalità è attivabile con ingressi digitali/analogici e con i bus di campo Modbus RTU e profiNet RT. Il posizionatore prevede la gestione di un massimo di 64 quote impostabili. Come nella quota singola, per ogni quota sono impostabili i valori della posizione di target, velocità, accelerazione, decelerazione e jerk. Le posizioni possono essere di tipo assoluto o relativo. Le quote vengono scritte in una tabella sul drive o da Caliper o dal bus di campo. Le quote possono essere eseguite singolarmente o concatenate in vari modi permettendo così di generare profili più complessi. E' implementata la funzione di ciclare in modo automatico la serie di quote concatenate e di interporre un tempo di attesa tra una quota e l'altra. |
|
Posizionatore ciclico. |
|
|
Questa modalità è simile al posizionatore con quota da tabella con la differenza che le quote vengono eseguite rigidamente una di seguito all'altra. Le quote sono attivabili manualmente tramite I/O o tramite Modbus RTU. E' prevista l'opzione per rendere ciclica la sequenza di quote impostate. |
|
Posizionatore "Input-start. |
|
|
Questa modalità permette di sincronizzare la partenza di un asse rispetto all'arrivo in posizione di un altro asse, senza dover utilizzare un PLC. Differisce dal precedente in quanto l'ingresso che seleziona la quota o il gruppo di quote concatenate, diventa anche il comando di start della quota stessa. Il segnale di "posizionamento raggiunto" è attivabile su ciascuna delle uscite digitali del drive. Pertanto collegando una delle uscite di quota raggiunta di un servodrive NTT ad un ingresso di un altro servodrive NTT, ne permette la partenza sincronizzata di quest'ultimo. Questa modalità funziona solo con ingressi digitali/analogici e con il bus di campo Modbus RTU. |
|
Controllo di velocità e limite di coppia. |
|
|
Il controllo di velocità è una modalità che consente di controllare la velocità del motore tramite un riferimento di velocità gestito da un ingresso analogico, in frequenza o da un comando tramite bus di campo. |
|
Controllo di coppia. |
|
| Il controllo di coppia è una modalità che consente di controllare la coppia erogata dal motore tramite un riferimento di coppia gestito da un ingresso analogico o da un comando tramite bus di campo ModBus, CanOpen, EtherCat o Profibus. Il riferimento di coppia che viene fornito è in proporzione alla coppia nominale del motore. In base al tipo di riferimento con cui si lavora è possibile impostare dal software Caliper vari parametri relativi ad esempio ai fondoscala per gli ingressi analogici, i regolatori PID ottimali per l'applicazione, gli I/O digitali desiderati. |
|
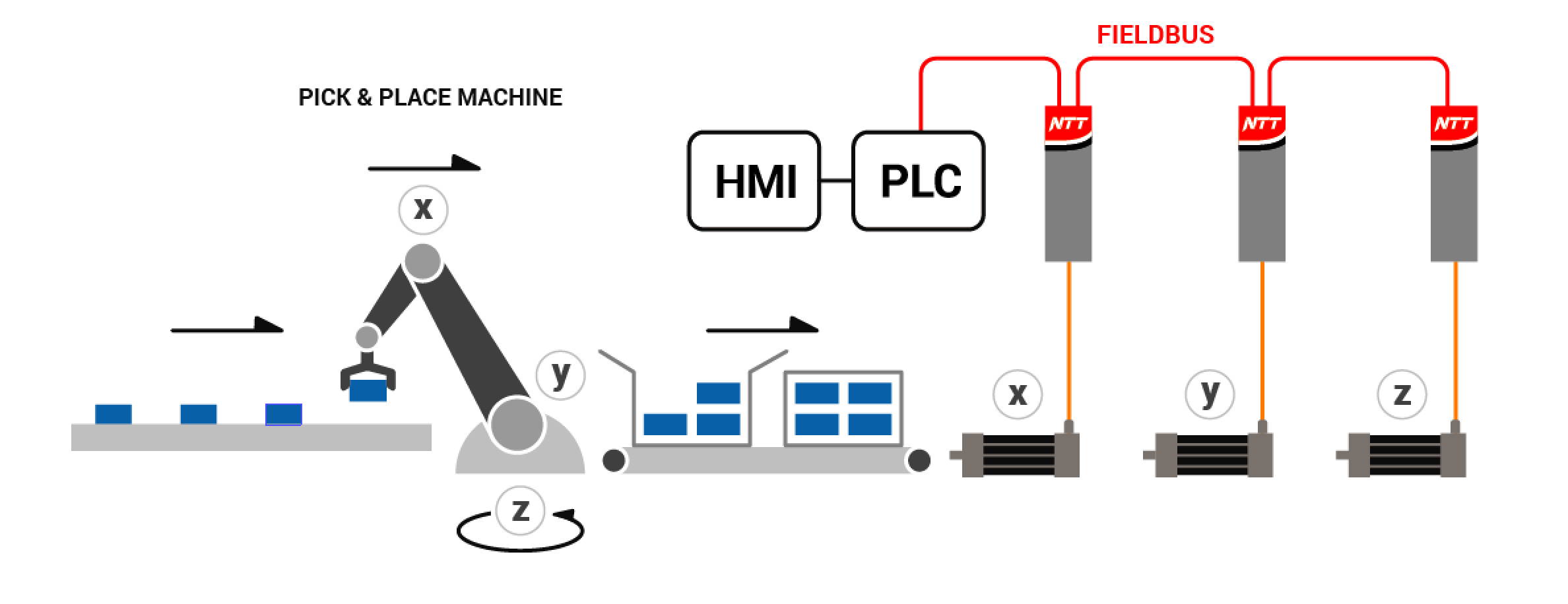
Controllo di Pressione. |
|
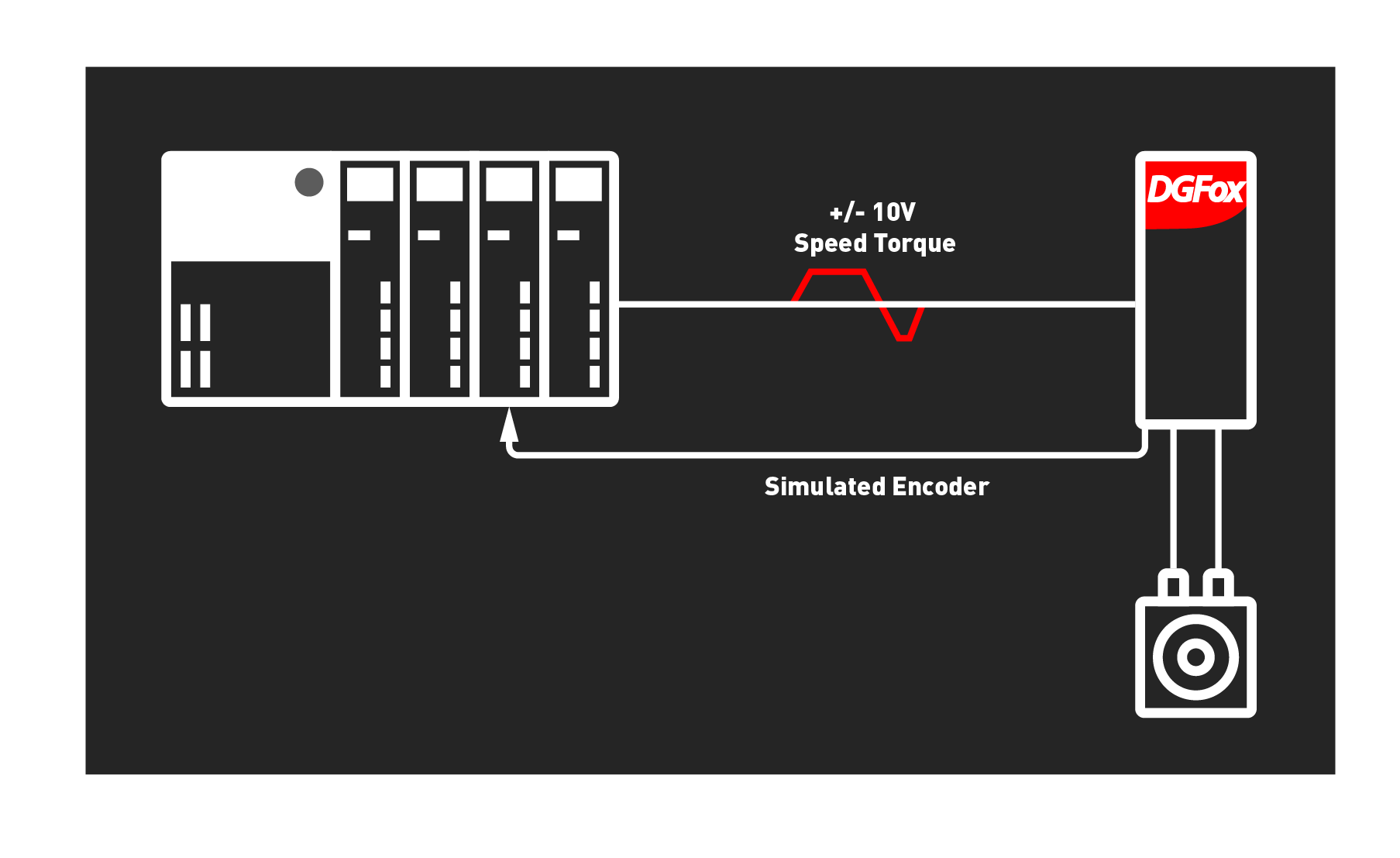
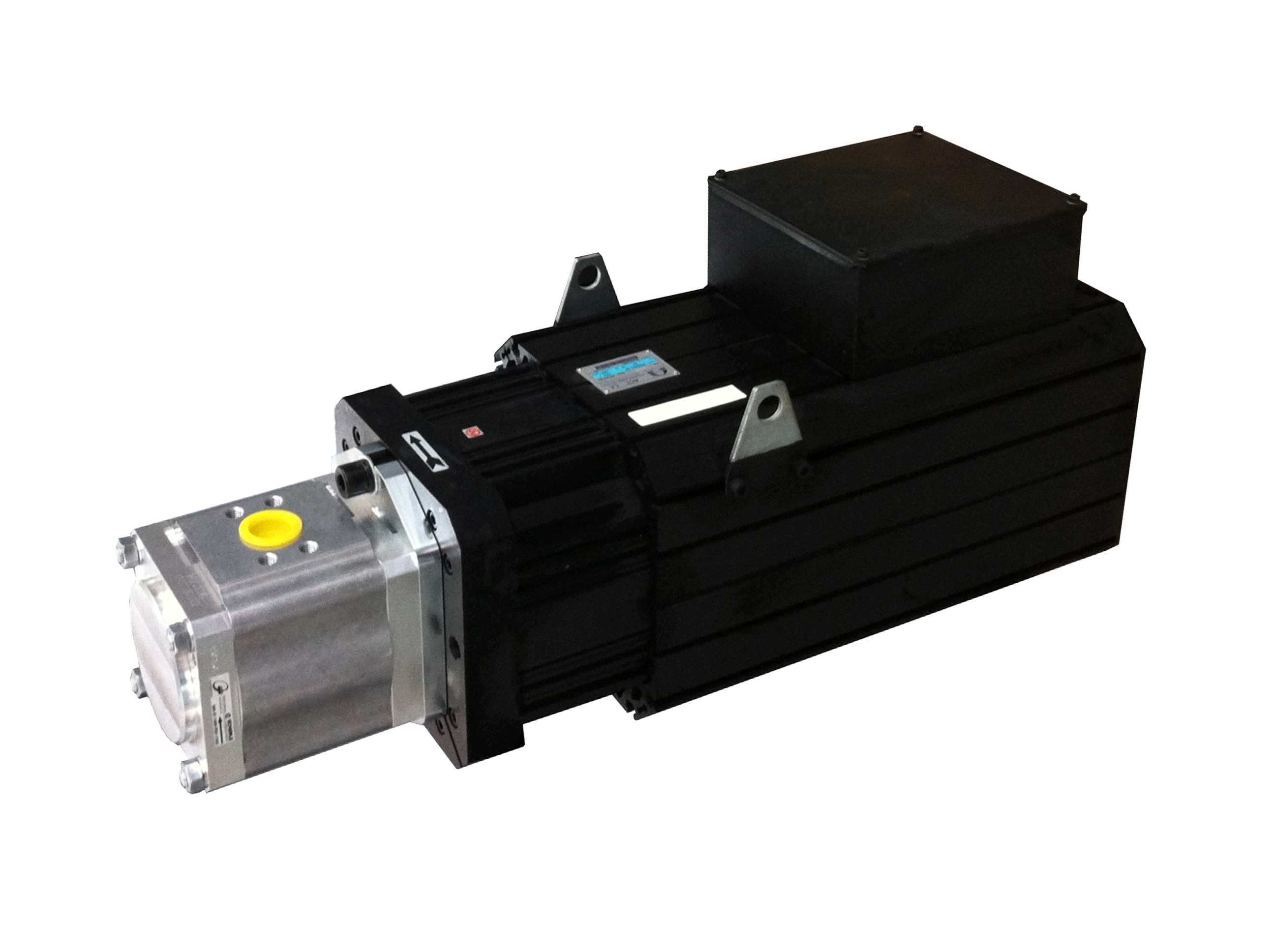
| Il servodrive NTT integra un modo operativo chiamato "controllo di pressione", pensato specificatamente per il funzionamento delle applicazioni che utilizzano servo-pompe come nelle presse e nelle macchine per iniezione della plastica ovvero le applicazioni che combinano un sistema idraulico ad una regolazione elettrica con azionamento e motore brushless. |
|
Attivando questa modalità nei servodrive NTT, vengono abilitati tre ingressi. Un primo ingresso per il segnale di riferimento di velocità utilizzato per regolare la velocità di un motore connesso ad una pompa e quindi la relativa portata. Un secondo ingresso viene abilitato per ricevere il segnale del riferimento di pressione mentre un terzo ingresso viene abilitato per il segnale del trasduttore di pressione ( feedback di pressione). I due segnali di pressione vengono confrontati ed il servodrive esercita un controllo di velocità per manterere la pressione reale uguale a quello del riferimento.
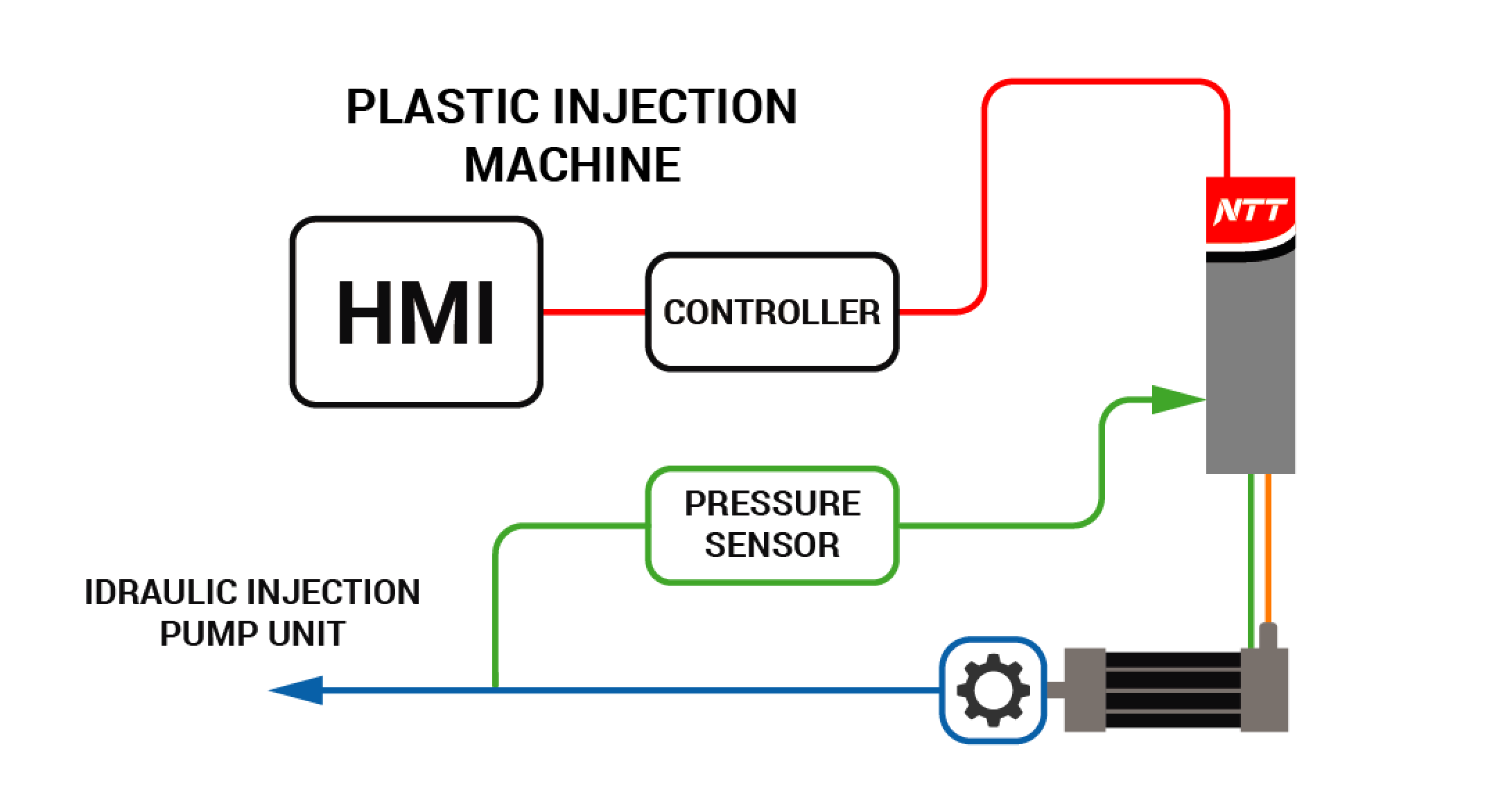
L'abbinamento di NTT con un servomotore brushless grazie a questo applicativo permette di rimpiazzare un tradizionale sistema con pompa e motore asincrono ottenendo un incredibile beneficio nell'efficienza del sistema. Vengono drasticamente ridotti i consumi di energia, si riduce la temperatura dell'olio del circuito, si semplifica il sistema idraulico grazie all'eliminazione delle valvole proporzionali e si esercita un miglior controllo sulla pressione e portata che si riflettono sulla qualità del prodotto. Sistema di controllo con tempi di risposta minimi che permettono un controllo di moto preciso con rilevanti miglioramenti nella qualità della lavorazione. Il drastico risparmio energetico lo si deve al fatto che NTT permette di fermare il motore mantenendo in pressione il sistema con un assorbimento di potenza prossimo allo zero, quando invece con i sistemi tradizionali dotati di motore asincrono, il motore è costretto a ruotare a velocità fissa intorno ai 1500rpm per mantenere la pressione del sistema anche se l'applicazione non sta lavorando.
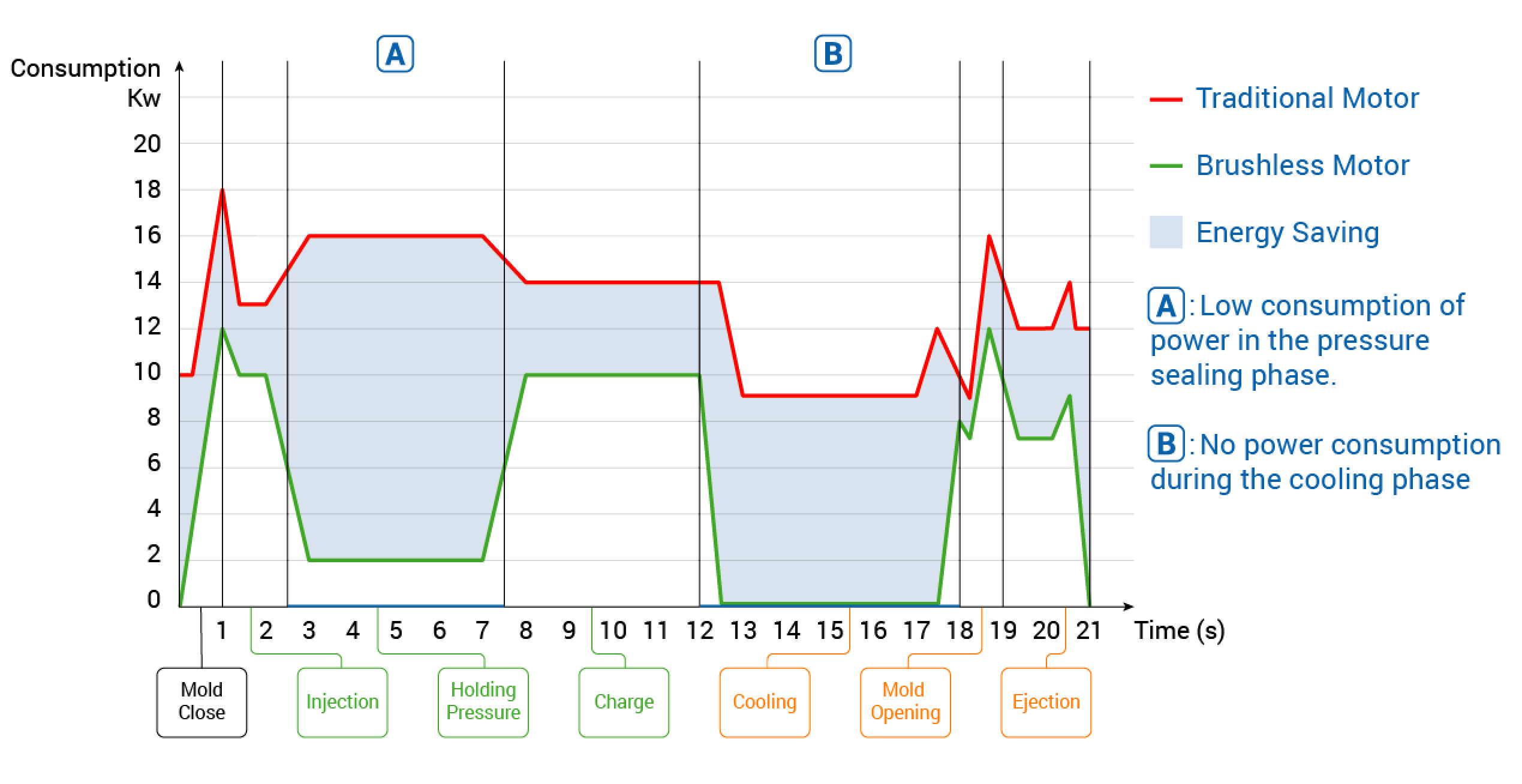
Come conseguenza una pompa dotata di NTT viene gestita a velocità variabile e consente di ridurre il riscaldamento del sistema rispetto ad un circuito che lavora costantemente a velocità fissa anche solo per mantenere la pressione. Questo migliora la circolazione dell'olio nel sistema che si mantiene a temperature basse permettendo l'installazione di radiatori di dimensioni ridotte. Il servodrive permette la massima ripetibilità nella regolazione di flussi garantendo una migliore qualità del prodotto realizzato. Inoltre tra i motori, il brushless è quello con il più elevato rendimento attestandosi su valori intorno al 95%. Non ultimo il sistema è molto più silenzioso e con ingombri inferiori.
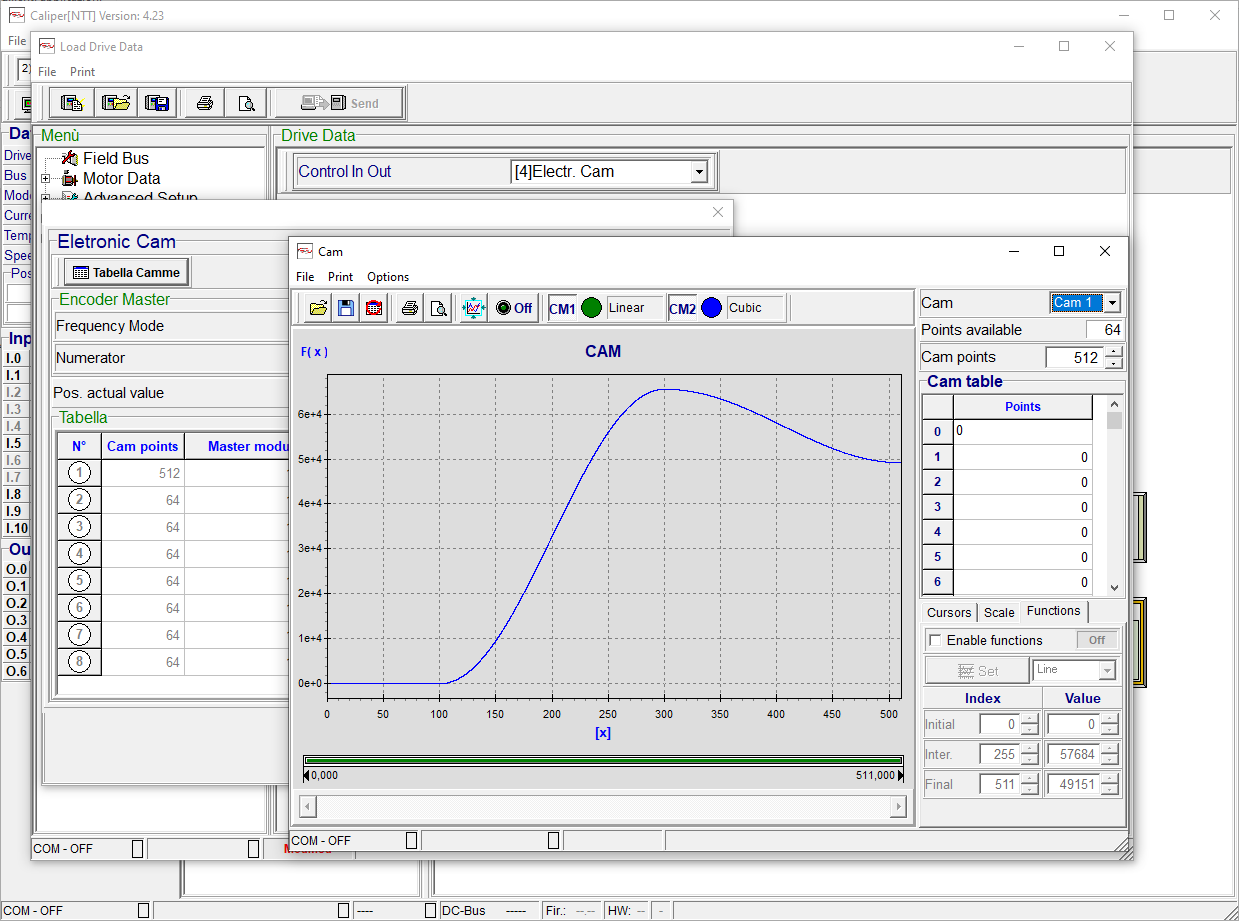
Asse elettrico. |
|
| L'asse elettrico è una funzione standard dell'azionamento NTT che consente di impostare tra uno o più motori un rapporto di trasmissione elettronica, dove un asse slave, detto anche "follower", insegue secondo un rapporto preimpostato, un asse master. Tale rapporto è impostato nell'azionamento slave e può essere variato a piacimento. Il movimento del master viene misurato da un encoder il cui segnale viene inviato in ingresso al drive follower che lo segue secondo il rapporto impostato. L'asse elettrico replica il principio della trasmissione meccanica, come avviene ad esempio in un riduttore, una vite a ricircolo di sfere, una cremagliera o un sistema di cinghie e pulegge. La trasmissione di riduzione meccanica permette il cambio di velocità, l'incremento di coppia e aiuta a raggiungere la corrispondenza di inerzia desiderata tra il motore e il carico. | |
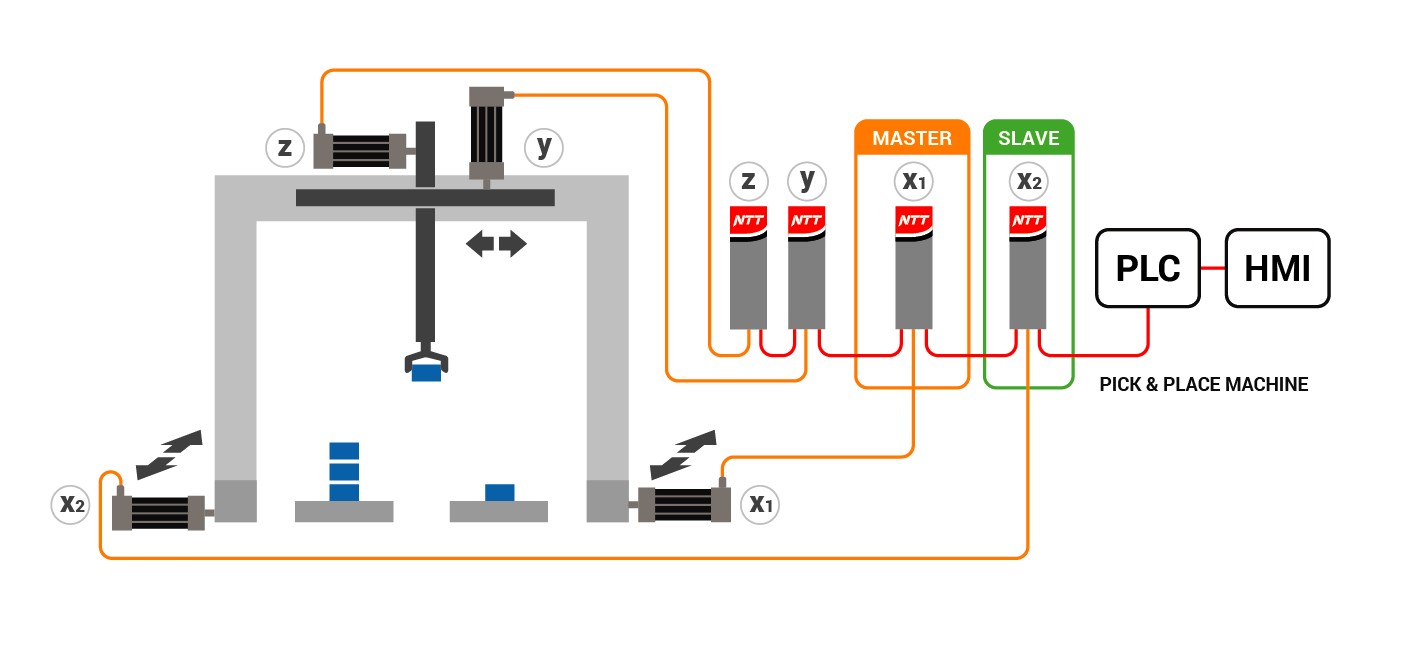
La funzione di asse elettrico rispetto alla trasmissione meccanica regola solo la velocità ma con il vantaggio di poterla variare a piacimento e di eliminare i giochi e degradi tipici della meccanica. Ad un asse master è possibile collegare molti assi slave in rapporti di asse elettrico diverso. Nel gestire l'asse elettrico è importante calibrare bene i parametri dell'asse slave in particolare i tempi di risposta.
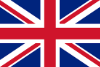
Controllo camma elettronica. |
|
| La camma elettronica è una funzionalità che replica il concetto di camma meccanica. La camma in meccanica è una elemento sagomato con forma irregolare ( tipicamente ovoidale ) fissata ad un albero rotante di un asse e che impartisce un moto ad un altra parte meccanica che ne segue e riproduce il profilo. Nella camma elettronica, la regolazione meccanica è rimpiazzata dall'elettronica. Viene definito il profilo di camma tramite una tabella X/Y con un massimo di 576 punti tra loro interpolabili. Ma a differenza della camma meccanica, ove il profilo di camma è fissato sull'asse master, nella camma elettronica il profilo viene inserito nel servodrive che pilota il motore inseguitore, lo "slave". | |
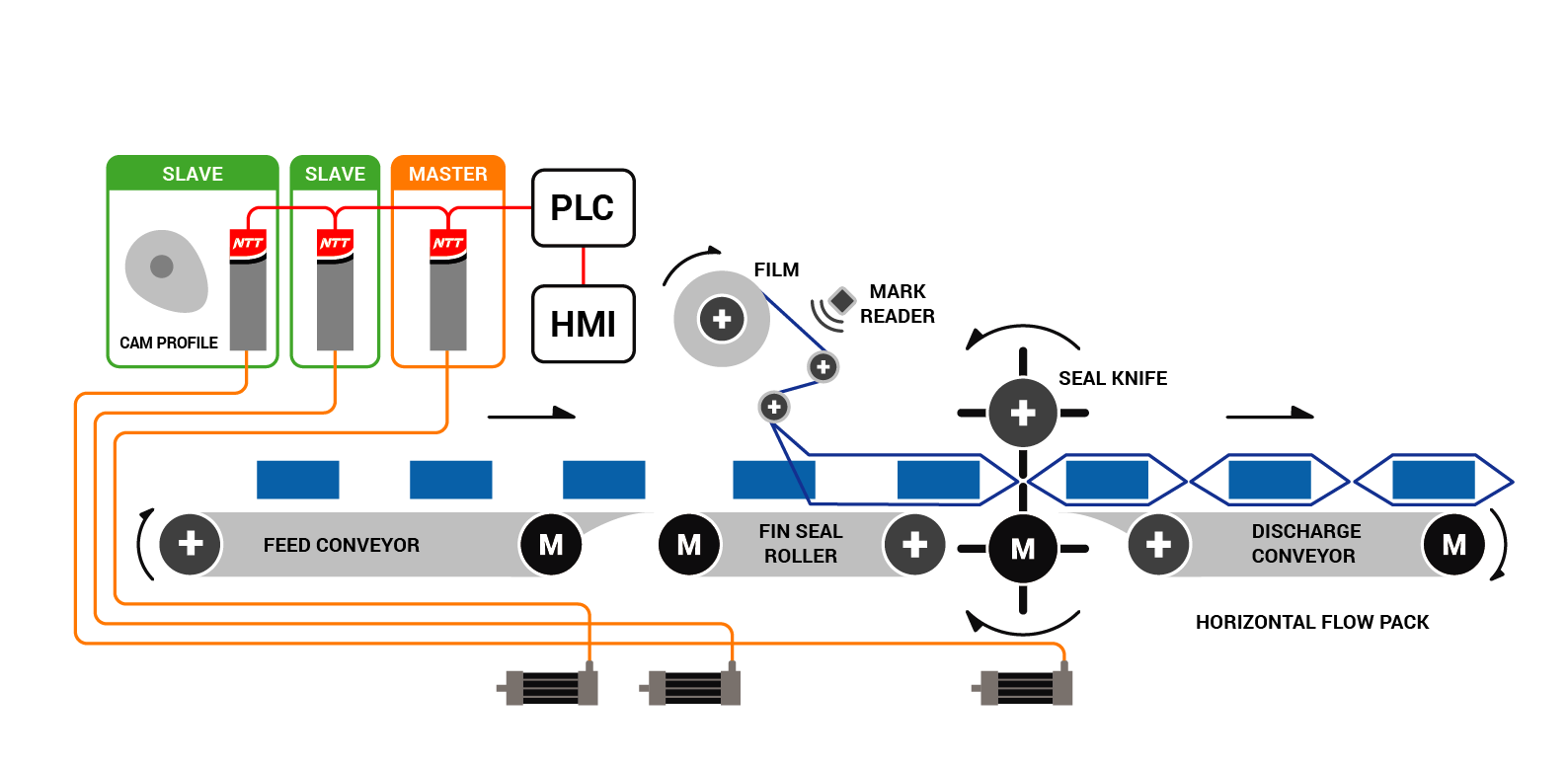
L'asse "slave" riceve il riferimento di spazio dell'asse "Master" ed esegue il profilo descritto nella tabella di punti X/Y generando il moto che ne consegue. Il segnale dell'asse master può arrivare o da un encoder esterno o da un segnale di encoder simulato di un altro asse servo. Sono impostabili 8 tipi di profili diversi richiamabili da ingressi I/O oppure è possibile tramite il Modbus aggiornare il profilo di camma a piacimento. Il vantaggio della camma elettronica rispetto a quella meccanica si evidenzia nella flessibilità di gestire più di un profilo, di poter modificare la forma del profilo con estrema facilità in qualsiasi momento e non ultimo la riduzione dei giochi meccanici e le relative regolazioni che ne conseguono.