

Descrizione
La serie TMC460Evo® di HDT comprende una gamma completa di servoazionamenti digitali in esecuzione monoasse per il funzionamento su reti a 400VAC con taglie in corrente fino a 3A corrispondenti a potenze nominali fino a 2W.
TMC460Evo® permette il controllo motore di servomotori brushless, asincroni, in corrente continua a magneti permanenti e lineari.
Pilotaggio sia dal riferimento analogico che da protocollo EtherCat, ProfiNet, CanOpen e Modbus.
Feedback da encoder incrementali, encoder assoluto SSI e da resolver.
TMC460Evo® integra di serie il controllo di velocità, di coppia, il posizionatore, l'asse elettrico, la camma elettronica ed il controllo di pressione.
Una porta Ethernet consente il collegamento alla rete aziendale e anche il monitoraggio da remoto.
Facili da programmare si collegano tramite la porta USB al veloce software di gestione Caliper.
Specifiche Tecniche
Metodi di controllo |
||
| Anelli di regolazione di coppia, velocità e posizione digitali. |
- motore sincrono AC brushless rotativo e lineare: controllo FOC, modulazione SVM, con feedback o sensorless. |
|
Riferimento principale |
||
| Analogico |
±10V differenziali velocità e coppia 12Bit |
|
Riferimento ausiliario |
||
| Analogico |
0/+10V single ended - 12Bit |
|
Riferimento in frequenza |
||
|
Velocità e posizione |
- Impulsi e direzione ( 2MHz ) |
|
Bus di campo opzionali |
||
|
- Modbus RTU |
||
Retroazione principale |
||
|
Sensori di Halls |
- Sensori di Hall con sequenza a 120° |
|
|
Encoder |
- Enc. Incrementale 5V Line Drive con/senza sensori di Halls (aliment. regolabile da 5 a 9V) |
|
|
Sensorless |
- Controllo sensorless per controllo asincrono FOC e V/Hz |
|
Retroazione opzionale |
||
|
Resolver |
- Resolver a 2 poli. Convertitore A/D a 16 Bit con uscita encoder simulato 5V Line Drive. |
|
Uscita encoder |
||
|
Encoder simulato |
- Simulazione Enc. Inc. 5V Line Drive (solo per resolver) : selezionabili 256, 1024, 4096 o 16384ppr |
|
| Ripetizione |
- Ripetizione canali ABZ della retroazione principale |
|
Modalità di controllo |
||
|
Velocità |
- Velocità con/senza limite di coppia.Rampe regolabili trapezoidali o ad "S" |
|
| Coppia |
- Controllo di coppia |
|
| Posizione |
- Multiposizionatore: Singola quota, Tabella ciclica/aciclica, da ingresso analogico |
|
| Pressione |
- Controllo di pressione |
|
Ingressi e uscite configurabili |
||
|
Ingressi |
- 6 ingressi digitali NPN/PNP programmabili (2 Touch Probe) |
|
| Uscite |
- 3 uscite digitali NPN/PNP programmabili |
|
Filtri digitali |
||
|
- Observer sulla retroazione da motore. |
||
Protezione drive e motore |
||
|
- Cortocircuito |
||
Interfaccia drive |
||
|
- 3 LED sul drive per segnalazione stato e allarmi. Informazioni complete via Bus di campo. |
||
Funzioni di sicurezza Hardware |
||
|
- STO : ingresso di sicurezza Safe Torque Off secondo la norma IEC61800-5 - SIL3 Cat.0: EN61508 |
||
Funzioni di sicurezza Software |
||
|
- Arresti di Emergenza o di Fault reaction: Per inerzia - in Rampa - in Limite di Coppia |
||
Gestione frenatura |
||
|
- Gestione del freno integrata con arresto immediato o in rampa |
||
Parametrizzazione Drive |
||
|
- Tramite software CALIPER 4.0 attraverso la porta microUSB 2.0 |
||
Funzionalità aggiuntive |
||
|
- Procedura di autofasatura del motore disponibile per ogni tipologia di feedback. |
||
Taglie in corrente
| Taglie in corrente | U.m. | 1.5 | 3 |
| Rete di alimentazione | VAC | 400VAC 3Ph |
|
| Tensione d'alimentazione Min/Max | VDC | 400VAC ±15% - 50/60Hz |
|
| Alimentazione DC Min/Max | VDC | 400 VDC ÷ 700 VDC |
|
| Corrente nominale | Arms | 1.5 | 3 |
| Corrente di picco per 2” | Arms | 3 | 6 |
| Max potenza d’uscita |
KW | 0.9 | 1.8 |
| Max potenza d'uscita (DC brushed) | KW | 0.75 | 1.15 |
| Metodo di controllo | IGBT/PWM, sinusoidale o trapezoidale per motori sincroni per motori in c.c. a magneti permanenti e motori asincroni. | ||
| Resistenza interna di frenatura | W | NO | |
| Uscita per resistenza esterna di frenatura |
SI | ||
| Resistenza di frenatura esterna suggerita (opzionale) |
R90W 100R | ||
| Filtro EMC | ESTERNO OPZIONALE ( a norma EMC 61800-3 cat.C2 e C3 ) | ||
| Alimentazione della logica | VDC | 24VDC ± 20% | |
| Ventilazione forzata dinamica | NO | SI | |
| Dimensioni | T0 | ||
| Peso approssimativo | Kg | 1 | 1.2 |
| Funzioni di sicurezza | STO - Safe Torque Off: IEC61800-5-2:2007 - SIL3 Cat.0: EN61508:2001 ( EN954-1:1996 ) | ||
| *= ( a norma EMC 61800-3 cat.C3) |
|||
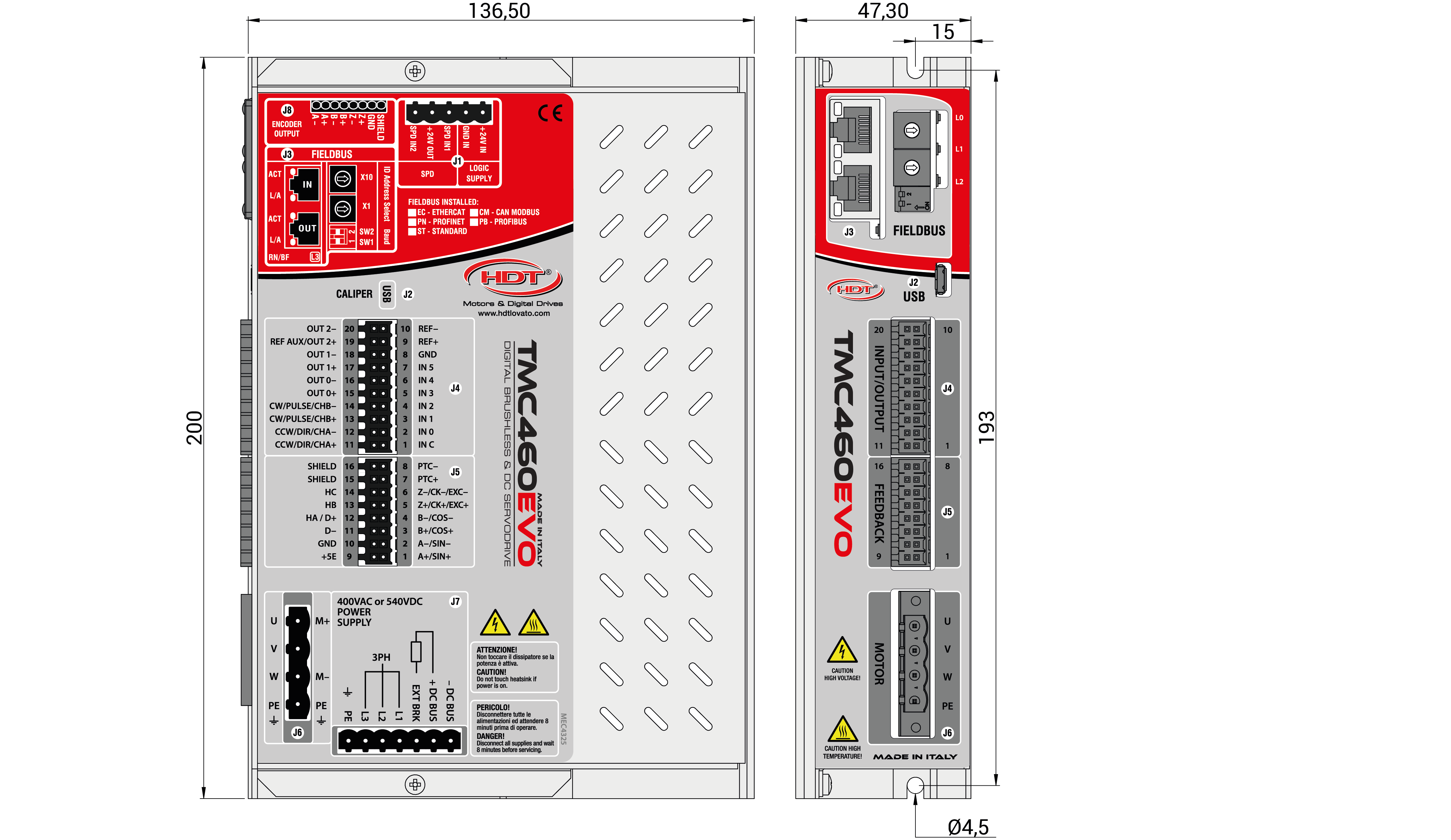
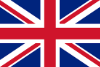
Dimensioni